Home Service Robot in Simulation
Mar 2020 – Apr 2020
• Home service robot which can do - Autonomous navigation with pick and place
of objects using differential drive robot.
• Project files for Home Service Robot -
- using turtlebot robot:
github page
- using Custom robot:
github page
Detailed information:
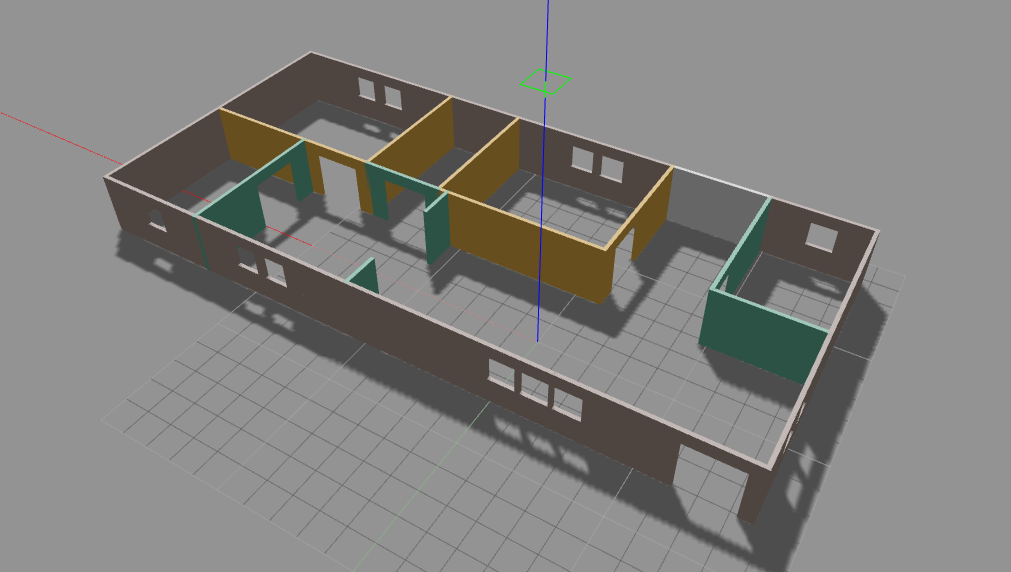
1. Building Gazebo Simulation world :
a. Built model of single floor wall structure using the Building Editor tool in Gazebo.
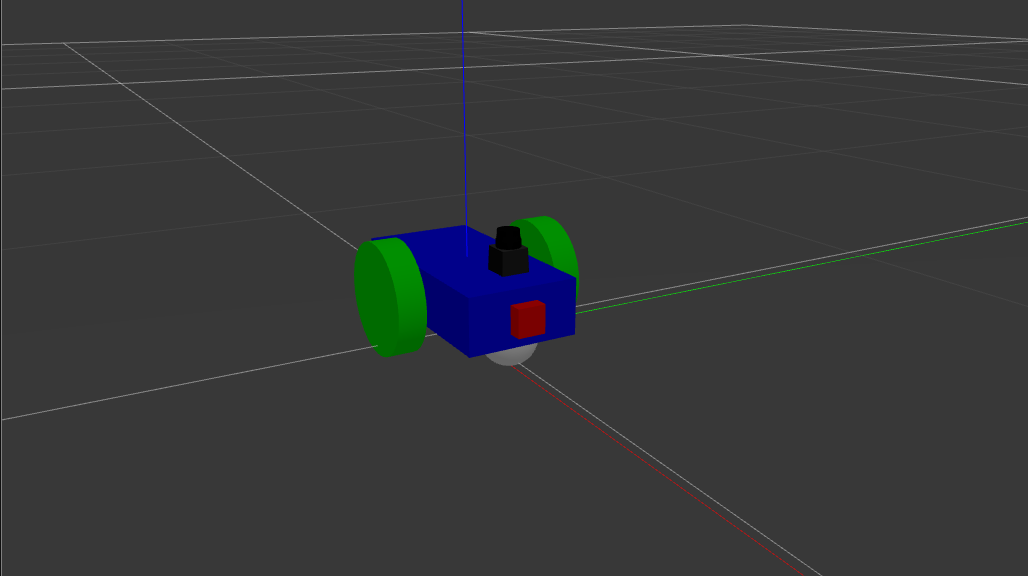
b. Built robot model using Model editor tool in Gazebo.
c. Import the world and model into the Gazebo world.
project files -
github page
2. Extended Kalman Filter :
a. Implementaion of Extended Kalman filter to estimate the robot's pose
b. Drive the robot around in simulation and observe the Odom and EKF trajectories
project files -
github page
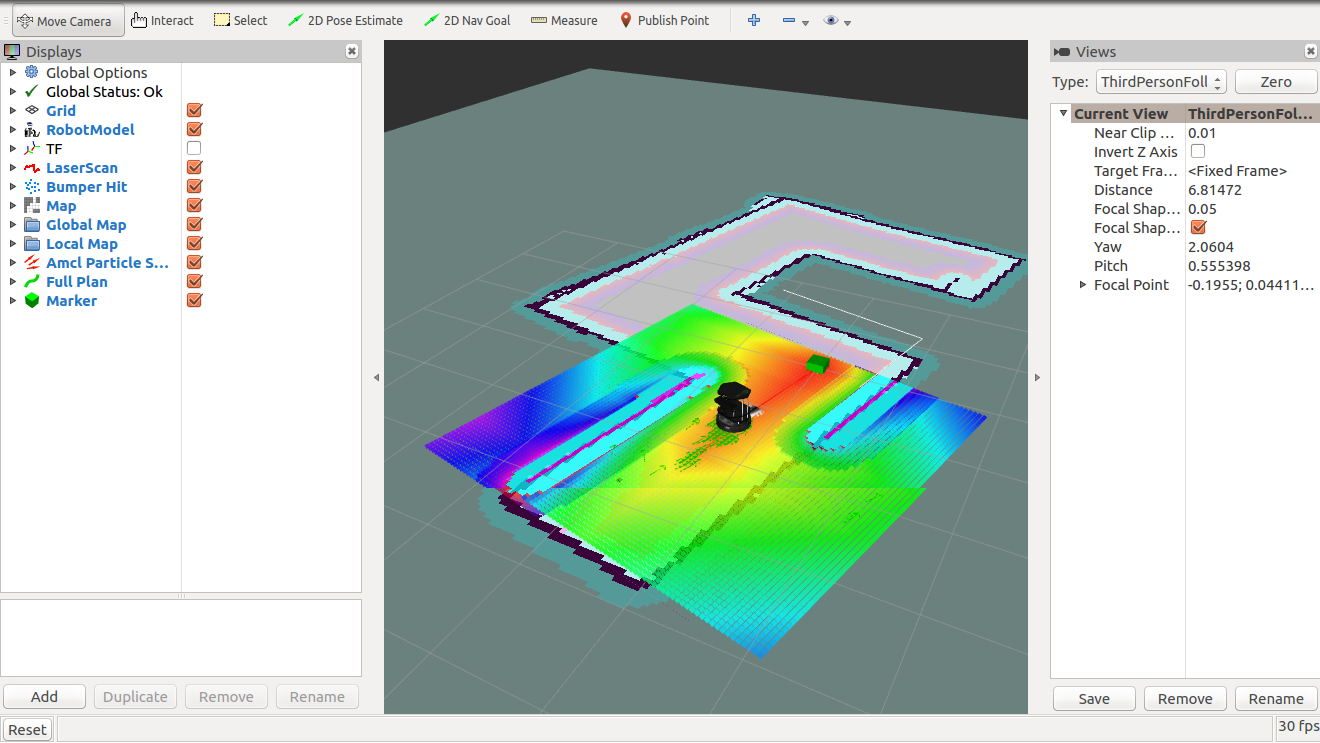
3. Localization using AMCL :
a. Using ROS AMCL package to accurately localize a mobile robot inside a map
b. Move the robot using tele-operation and check for the localization
project files -
github page
4. Building map using gmapping :
a. Implementing a gmapping ROS package which is based on the Grid-based FastSLAM algorithm
b. Map of the gazebo environmnet (my house) will be created
project files -
github page
5. Building map using RTAB-Map :
a. Creating a 2D occupancy grid and 3D octomap from a simulated environment
b. RTAB-Map is a popular solution for SLAM to develop robots that can map environments in 3D
project files -
github page